|
#2
June 17th, 2017, 02:44 PM
| |||
| |||
| Re: Electrical Engineering DTU
Here I am providing detailed syllabus of B.Tech Electrical Engineering 4th Semester Course of Delhi Technological University (DTU) for your reference: Delhi Technological University (DTU) B.Tech Electrical Engineering 4th Semester Syllabus TH1 *EE- 211 Linear Integrated Circuits TH2 EE- 212 Control Systems-I TH3 *EE- 213 Digital Circuits & Systems TH4 EE- 214 Power Systems –I TH5 *EE- 215 Electrical Machines-II TH6 *EE-216 Electromagnetic Field Theory PR1 *EE- 217 Linear Integrated Circuits Lab PR2 EE- 218 Power Systems- I Lab PR3 *EE- 219 Electrical Machines- II Lab PR4 #EE- 220 Term Paper-II EE 211 Linear Integrated Circuits UNIT I Feedback Amplifiers : General feedback structure, properties of negative feedback, basic feedback topologies, determination of loop-gain, stability problem UNIT II IC OP-AMP Applications : OP-AMP fundamentals (Brief review of differential amplifier, current mirror, active load, level shifter, output stage; ac and dc characteristics), basic building blocks using OP-AMPS, inverting/non inverting VCVS, integrators, differentiators, CCVS, Instrumentation amplifiers, Biquad filter (LP, HP, BP and notch), Oscillators, A/ D & D/A convertors UNIT III Non-linearAmplifiers : Logarithmic amplifiers, Log/antilog modules, Precision rectifier, Peak detector, Sample and Hold circuits UNIT IV Comparators and Timers : OP-AMP as comparator, Schmitt Trigger, Square and Triangular wave generator, mono stable and astable multi vibrator, IC timers and their applications. IC Analog multipliers: Basic circuits, applications UNIT V IC OTA Applications : Basic building blocks using OTA, electronically programmable functional circuit examples. Voltage regulators: (78/79, XX), 723 IC regulators (current limiting, current fold back), SMPS. Applications of analog switches: programmable gain amplifiers EE-212 Control System-I UNIT I Introduction : Linear, non linear, time varying and linear time invariant system, servomechanism, historical development of automatic control and introduction to digital computer control, mathematical models of physical systems, differential equations of physical systems, transfer functions, block diagram algebra and signal flow graphs. UNIT II Feed Back Characteristics of Control Systems : Feedback and non‐feedback systems, advantages and disadvantages of negative feedback, regenerative feedback. Control Systems and Components: DC and AC servomotors, synchros, tacho generator and stepper motors, ADC and DAC etc. UNIT III Time Response Analysis, Design Specifications and Performance Indices : Standard test signals, time response of first‐order systems, time response of second‐order systems, steady‐state error and error constants, effect of adding a zero to a system, P, PI and PID control actions and their effect, design specifications of second‐order systems and performance indices. UNIT IV Concepts of Stability and Algebraic Criteria : The concept of stability, necessary and sufficient conditions for stability, Routh’s stability criterion and relative stability analysis. Root locus technique: root locus concept, construction of root loci, root contours, systems with transportation lag, sensitivity of the roots of the characteristic equation, analysis and design of control systems with MATLAB UNIT V Frequency Response Analysis : Correlation between time and frequency response, polar plots, Bode plots, and all pass and minimum‐phase systems. Stability in frequency domain: mathematical preliminaries, Nyquist stability criterion, definition of gain margin and phase margin, assessment of relative stability using Nyquist and Bode Plots, constant M‐circles, constant N‐circles, Nicholas chart, closed‐loop frequency response. 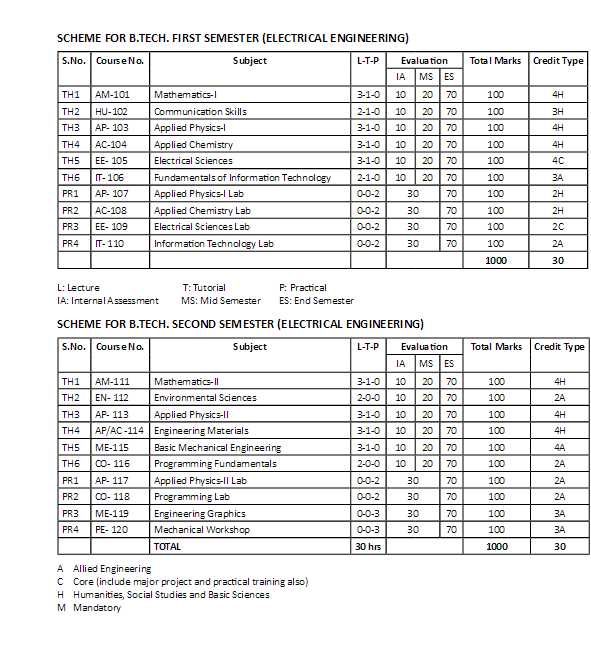 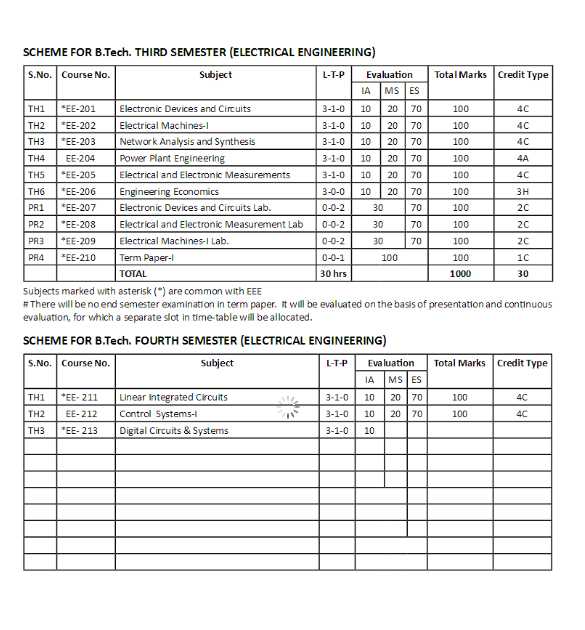 |